Toyota Camry et,
Toyota Camry et,
Toyota Partner.
Toyota Camry et,
DESCRIPTION
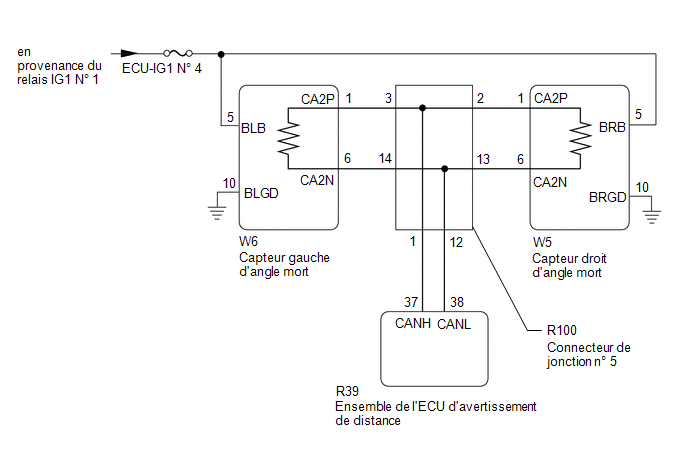
Ce DTC est enregistré lorsque le capteur de contrôle d'angle mort gauche estime qu'il y a un problème de communication au niveau du capteur de contrôle d'angle mort droit.
|
N° de DTC | Objet de la détection |
Condition de détection du DTC |
Organe incriminé |
|---|---|---|---|
|
U0232 | Perte de la communication avec le module auxiliaire de contrôle d'angle mort |
L'ensemble d'ECU d'avertissement de distance ne peut pas recevoir les signaux transmis par le capteur de moniteur d'angle mort (unité auxiliaire) |
|
| U0233 |
Perte de la communication avec le module principal de contrôle d'angle mort |
L'ensemble d'ECU d'avertissement de distance ne peut pas recevoir les signaux transmis par le capteur de moniteur d'angle mort (unité principale) |
|
SCHEMA DE CABLAGE
MESURE DE PRECAUTION / REMARQUE / CONSEIL
REMARQUE:
Cliquer ici .gif)
CONSEIL:
PROCEDURE
|
1. | VERIFIER DTC |
(a) Vérifier les DTC.
Body Electrical > Advanced Parking Guidance/ICS/Intuitive P/A > Trouble CodesRésultat:
|
Résultat | Passer au point |
|---|---|
|
Le DTC U0232 est uniquement émis |
A |
| Le DTC U0233 est uniquement émis |
B |
| Les DTC U0232 et U0233 sont émis |
C |
| B |
.gif) | PASSER AU POINT 5 |
| C |
| PASSER AU POINT 8 |
|
| 2. |
VERIFIER LE CABLE PRINCIPAL DE BUS CAN |
(a) Débrancher le câble de la borne négative (-) de la batterie.
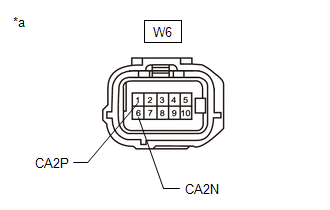
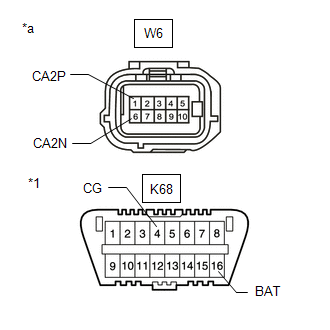
(b) Débrancher le connecteur W6 du capteur gauche d'angle mort.
| (c) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous. Résistance standard:
|
|
| MAL | | REPARER OU REMPLACER LE CABLE PRINCIPAL CAN OU LE CONNECTEUR (CAPTEUR DE MONITEUR D'ANGLE MORT GAUCHE - CONNECTEUR DE JONCTION N° 5) |
|
| 3. |
VERIFIER LE FAISCEAU DE CABLES ET LE CONNECTEUR (CAPTEUR DE MONITEUR D'ANGLE MORT GAUCHE - MASSE DE CARROSSERIE) |
Cliquer ici
| MAL | | REPARER OU REMPLACER LE CABLE PRINCIPAL CAN OU LE CONNECTEUR (CAPTEUR DE MONITEUR D'ANGLE MORT GAUCHE - CONNECTEUR DE JONCTION N° 5) |
|
| 4. |
VERIFIER LE FAISCEAU DE CABLES ET LE CONNECTEUR (SOURCE D'ALIMENTATION ELECTRIQUE DU CAPTEUR DE CONTROLE D'ANGLE MORT GAUCHE) |
Cliquer ici
| OK | | REMPLACER LE CAPTEUR GAUCHE D'ANGLE MORT |
| MAL | | REPARER OU REMPLACER LE FAISCEAU DE CABLES OU LE CONNECTEUR |
| 5. |
VERIFIER LE CABLE PRINCIPAL DE BUS CAN |
(a) Débrancher le câble de la borne négative (-) de la batterie.
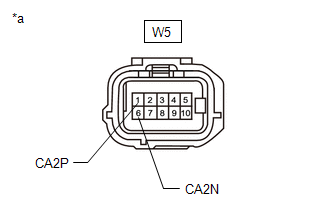
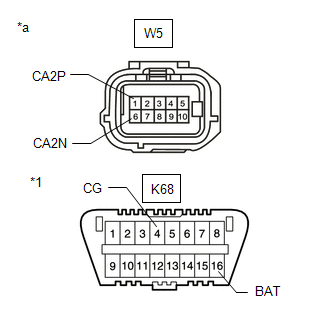
(b) Débrancher le connecteur W5 du capteur droit d'angle mort droit.
| (c) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous. Résistance standard:
|
|
| MAL | | REPARER OU REMPLACER LE CABLE PRINCIPAL CAN OU LE CONNECTEUR (CAPTEUR DE MONITEUR D'ANGLE MORT DROIT - CONNECTEUR DE JONCTION N° 5) |
|
| 6. |
VERIFIER LE FAISCEAU DE CABLES ET LE CONNECTEUR (CAPTEUR DE MONITEUR D'ANGLE MORT DROIT - MASSE DE CARROSSERIE) |
Cliquer ici
| MAL | | REPARER OU REMPLACER LE CABLE PRINCIPAL CAN OU LE CONNECTEUR (CAPTEUR DE MONITEUR D'ANGLE MORT GAUCHE - CONNECTEUR DE JONCTION N° 5) |
|
| 7. |
VERIFIER LE FAISCEAU DE CABLES ET LE CONNECTEUR (SOURCE D'ALIMENTATION ELECTRIQUE DU CAPTEUR DE CONTROLE D'ANGLE MORT DROITE) |
Cliquer ici
| OK | | REMPLACER LE CAPTEUR DROIT D'ANGLE MORT |
| MAL | | REPARER OU REMPLACER LE FAISCEAU DE CABLES OU LE CONNECTEUR |
| 8. |
VERIFIER LE CABLE PRINCIPAL DE BUS CAN (CAPTEUR DE MONITEUR D'ANGLE MORT GAUCHE) |
(a) Mettre le contacteur du moteur en position OFF.
(b) Débrancher le câble de la borne négative (-) de la batterie.
| (c) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous. Résistance standard:
|
|
Résultat:
|
Résultat | Passer au point |
|---|---|
|
OK | A |
|
Coupure de circuit au niveau des lignes du bus principal CAN |
B |
| Court-circuit entre les lignes bus |
C |
| D |
| B |
| PASSER AU POINT 11 |
| C |
| PASSER AU POINT 15 |
| D |
| PASSER AU POINT 19 |
|
| 9. |
VERIFIER LE CABLE DE BUS CAN (ENSEMBLE D'ECU D'AVERTISSEMENT DE DISTANCE) |
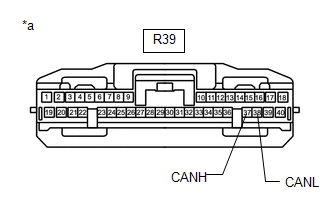
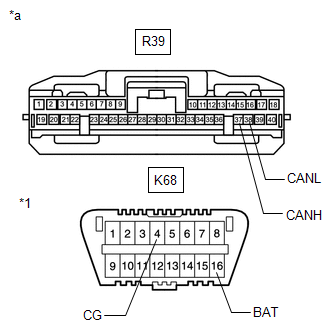
(a) Débrancher le connecteur R39 d'ensemble d'ECU d'avertissement de distance.
| (b) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous. Résistance standard:
|
|
| MAL | | REPARER OU REMPLACER LE CABLE DE BUS CAN (ENSEMBLE D'ECU D'AVERTISSEMENT DE DISTANCE - CONNECTEUR DE JONCTION N° 5) |
|
| 10. |
VERIFIER DTC |
(a) Supprimer les DTC.
Body Electrical > Advanced Parking Guidance/ICS/Intuitive P/A > Clear DTCs(b) Vérifier les DTC.
Body Electrical > Advanced Parking Guidance/ICS/Intuitive P/A > Trouble CodesRésultat:
|
Résultat | Passer au point |
|---|---|
|
Les DTC U0232 et U0233 sont émis |
A |
| Les DTC U0232 et U0233 ne sont pas émis |
B |
| A |
| REMPLACER L'ENSEMBLE D'ECU D'AVERTISSEMENT DE DISTANCE |
| B |
| UTILISER LA METHODE DE SIMULATION POUR EFFECTUER LA VERIFICATION |
| 11. |
RECHERCHER UNE EVENTUELLE COUPURE DANS LE CABLE DU BUS CAN (CONNECTEUR DE JONCTION N° 5) |
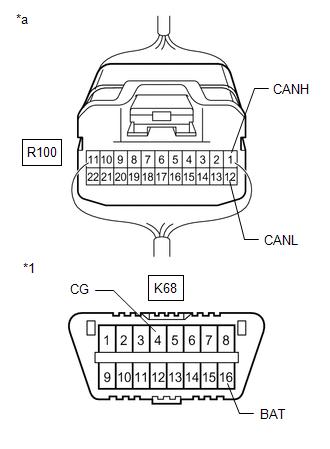
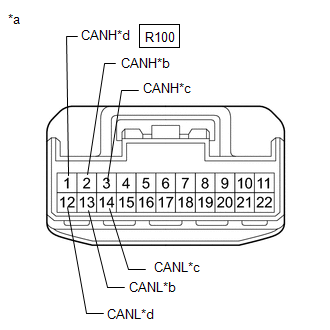
| (a) Débrancher le connecteur R100 du connecteur de jonction n° 5. |
|
(b) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
R100-3 (CANH) - R100-14(CANL) |
Câble débranché de la borne négative (-) de la batterie |
108 à 132 Ω |
|
R100-2 (CANH) - R100-13 (CANL) |
Câble débranché de la borne négative (-) de la batterie |
108 à 132 Ω |
|
R100-1 (CANH) - R100-12(CANL) | Câble débranché de la borne négative (-) de la batterie |
200 Ω minimum |
Résultat:
|
Résultat | Passer au point |
|---|---|
|
OK | A |
|
NG (vers le câble CAN principal du capteur de contrôle d'angle mort droit) |
B |
| NG (vers le câble CAN principal du capteur de contrôle d'angle mort gauche) |
C |
| NG (vers le câble CAN d'ensemble d'ECU d'avertissement de distance) |
D |
| A |
| REMPLACER LE CONNECTEUR DE JONCTION N° 5 |
| C |
| PASSER AU POINT 13 |
| D |
| PASSER AU POINT 14 |
|
| 12. |
RECHERCHER UNE EVENTUELLE COUPURE DANS LE CABLE DE BUS CAN PRINCIPAL (CAPTEUR DE CONTROLE D'ANGLE MORT DROIT) |
(a) Rebrancher le connecteur de jonction R100 n° 5.
| (b) Débrancher le connecteur W5 du capteur droit d'angle mort droit. |
|
(c) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
W5-1 (CA2P) - W5-6 (CA2N) |
Câble débranché de la borne négative (-) de la batterie |
108 à 132 Ω |
| OK | | REMPLACER LE CAPTEUR DROIT D'ANGLE MORT |
| MAL | | REPARER OU REMPLACER LE CABLE PRINCIPAL CAN OU LE CONNECTEUR (CAPTEUR DE MONITEUR D'ANGLE MORT DROIT - CONNECTEUR DE JONCTION N° 5) |
| 13. |
RECHERCHER UNE EVENTUELLE COUPURE DANS LE CABLE DE BUS CAN PRINCIPAL (CAPTEUR DE CONTROLE D'ANGLE MORT GAUCHE) |
(a) Rebrancher le connecteur de jonction R100 n° 5.
| (b) Débrancher le connecteur W6 du capteur gauche d'angle mort. |
|
(c) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
W6-1 (CA2P) -W6-6 (CA2N) |
Câble débranché de la borne négative (-) de la batterie |
108 à 132 Ω |
| OK | | REMPLACER LE CAPTEUR GAUCHE D'ANGLE MORT |
| MAL | | REPARER OU REMPLACER LE CABLE PRINCIPAL CAN OU LE CONNECTEUR (CAPTEUR DE MONITEUR D'ANGLE MORT GAUCHE - CONNECTEUR DE JONCTION N° 5) |
| 14. |
RECHERCHER UNE EVENTUELLE COUPURE DE CIRCUIT DANS LE CABLE DE BUS CAN (ENSEMBLE D'ECU D'AVERTISSEMENT DE DISTANCE) |
(a) Rebrancher le connecteur de jonction R100 n° 5.
| (b) Débrancher le connecteur R39 d'ensemble d'ECU d'avertissement de distance. |
|
(c) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
R39-37(CANH) - R39-38(CANL) |
Câble débranché de la borne négative (-) de la batterie |
54 à 69 Ω |
| OK | | REMPLACER L'ENSEMBLE D'ECU D'AVERTISSEMENT DE DISTANCE |
| MAL | | REPARER OU REMPLACER LE CABLE DE BUS CAN (ENSEMBLE D'ECU D'AVERTISSEMENT DE DISTANCE - CONNECTEUR DE JONCTION N° 5) |
| 15. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT DANS LES CABLES DE BUS CAN (CONNECTEUR DE JONCTION N° 5) |
| (a) Débrancher le connecteur R100 du connecteur de jonction n° 5. |
|
(b) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
R100-3 (CANH) - R100-14(CANL) |
Câble débranché de la borne négative (-) de la batterie |
108 à 132 Ω |
|
R100-2 (CANH) - R100-13(CANL) |
Câble débranché de la borne négative (-) de la batterie |
108 à 132 Ω |
|
R100-1 (CANH) - R100-12(CANL) |
Câble débranché de la borne négative (-) de la batterie |
200 Ω minimum |
Résultat:
|
Résultat | Passer au point |
|---|---|
|
OK | A |
|
NG (vers le câble CAN principal du capteur de contrôle d'angle mort droit) |
B |
| NG (vers le câble CAN principal du capteur de contrôle d'angle mort gauche) |
C |
| NG (vers le câble CAN d'ensemble d'ECU d'avertissement de distance) |
D |
| A |
| REMPLACER LE CONNECTEUR DE JONCTION N° 5 |
| C |
| PASSER AU POINT 17 |
| D |
| PASSER AU POINT 18 |
|
| 16. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT DANS LES CABLES DE BUS CAN (CAPTEUR DE CONTROLE D'ANGLE MORT DROIT) |
(a) Rebrancher le connecteur de jonction R100 n° 5.
| (b) Débrancher le connecteur W5 du capteur droit d'angle mort droit. |
|
(c) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
W5-1 (CA2P) - W5-6 (CA2N) |
Câble débranché de la borne négative (-) de la batterie |
108 à 132 Ω |
| OK | | REMPLACER LE CAPTEUR DROIT D'ANGLE MORT |
| MAL | | REPARER OU REMPLACER LE CABLE PRINCIPAL CAN OU LE CONNECTEUR (CAPTEUR DE MONITEUR D'ANGLE MORT DROIT - CONNECTEUR DE JONCTION N° 5) |
| 17. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT DANS LES CABLES DE BUS CAN (ENSEMBLE DE CONTROLE D'ANGLE MORT GAUCHE) |
(a) Rebrancher le connecteur de jonction R100 n° 5.
| (b) Débrancher le connecteur W6 du capteur gauche d'angle mort. |
|
(c) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
W6-1 (CA2P) -W6-6 (CA2N) |
Câble débranché de la borne négative (-) de la batterie |
108 à 132 Ω |
| OK | | REMPLACER LE CAPTEUR GAUCHE D'ANGLE MORT |
| MAL | | REPARER OU REMPLACER LE CABLE PRINCIPAL CAN OU LE CONNECTEUR (CAPTEUR DE MONITEUR D'ANGLE MORT GAUCHE - CONNECTEUR DE JONCTION N° 5) |
| 18. |
RECHERCHER UN COURT-CIRCUIT EVENTUEL DANS LES CABLES DE BUS CAN (ENSEMBLE D'ECU D'AVERTISSEMENT DE DISTANCE) |
(a) Rebrancher le connecteur de jonction R100 n° 5.
| (b) Débrancher le connecteur R39 d'ensemble d'ECU d'avertissement de distance. |
|
(c) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
R39-37(CANH) - R39-38(CANL) |
Câble débranché de la borne négative (-) de la batterie |
54 à 69 Ω |
| OK | | REMPLACER L'ENSEMBLE D'ECU D'AVERTISSEMENT DE DISTANCE |
| MAL | | REPARER OU REMPLACER LE CABLE DE BUS CAN (ENSEMBLE D'ECU D'AVERTISSEMENT DE DISTANCE - CONNECTEUR DE JONCTION N° 5) |
| 19. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT DANS LES CABLES DE BUS CAN (CONNECTEUR DE JONCTION N° 5) |
(a) Débrancher le connecteur R100 du connecteur de jonction n° 5.
(b) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
|
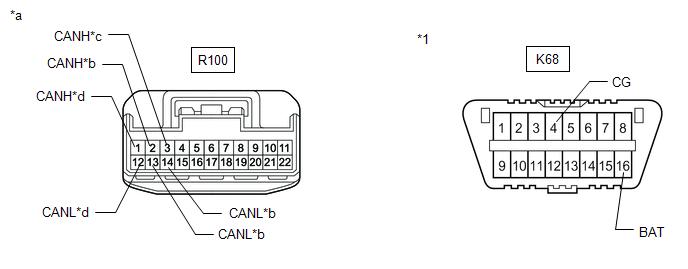
*1 | DLC3 |
- | - |
|
*a | Vue avant du connecteur côté faisceau de câbles (vers le connecteur de jonction n° 5) |
*b | vers le câble CAN principal du capteur de contrôle d'angle mort droit |
|
*c | vers le câble CAN principal du capteur de contrôle d'angle mort gauche |
*d | vers le câble CAN d'ensemble d'ECU d'avertissement de distance |
Résistance standard:
|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
R100-3 (CANH) - K68-4 (CG) |
Câble débranché de la borne négative (-) de la batterie |
200 Ω minimum |
|
R100-14 (CANL) - K68-4 (CG) |
Câble débranché de la borne négative (-) de la batterie |
200 Ω minimum |
|
R100-3 (CANH) - K68-16 (BAT) |
Câble débranché de la borne négative (-) de la batterie |
6 kΩ minimum |
|
R100-14 (CANL) - K68-16 (BAT) |
Câble débranché de la borne négative (-) de la batterie |
6 kΩ minimum |
|
R100-1 (CANH) - K68-4 (CG) |
Câble débranché de la borne négative (-) de la batterie |
200 Ω minimum |
|
R100-12 (CANL) - K68-4 (CG) |
Câble débranché de la borne négative (-) de la batterie |
200 Ω minimum |
|
R100-1 (CANH) - K68-16 (BAT) |
Câble débranché de la borne négative (-) de la batterie |
6 kΩ minimum |
|
R100-12 (CANL) - K68-16 (BAT) |
Câble débranché de la borne négative (-) de la batterie |
6 kΩ minimum |
|
R100-2 (CANH) - K68-4 (CG) |
Câble débranché de la borne négative (-) de la batterie |
200 Ω minimum |
|
R100-13 (CANL) - K68-4 (CG) |
Câble débranché de la borne négative (-) de la batterie |
200 Ω minimum |
|
R100-2 (CANH) - K68-16 (BAT) |
Câble débranché de la borne négative (-) de la batterie |
6 kΩ minimum |
|
R100-13 (CANL) - K68-16 (BAT) |
Câble débranché de la borne négative (-) de la batterie |
6 kΩ minimum |
Résultat:
|
Résultat | Passer au point |
|---|---|
|
OK | A |
|
NG (vers le câble CAN principal du capteur de contrôle d'angle mort droit) |
B |
| NG (vers le câble CAN principal du capteur de contrôle d'angle mort gauche) |
C |
| NG (vers le câble CAN d'ensemble d'ECU d'avertissement de distance) |
D |
| A |
| REMPLACER LE CONNECTEUR DE JONCTION N° 5 |
| C |
| PASSER AU POINT 21 |
| D |
| PASSER AU POINT 22 |
|
| 20. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT DANS LES CABLES DE BUS CAN (CAPTEUR DE CONTROLE D'ANGLE MORT DROIT) |
(a) Rebrancher le connecteur de jonction R100 n° 5.
(b) Débrancher le connecteur W5 du capteur droit d'angle mort droit.
| (c) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous. Résistance standard:
|
|
| OK | | REMPLACER LE CAPTEUR DROIT D'ANGLE MORT |
| MAL | | REPARER OU REMPLACER LE CABLE PRINCIPAL CAN OU LE CONNECTEUR (CAPTEUR DE MONITEUR D'ANGLE MORT DROIT - CONNECTEUR DE JONCTION N° 5) |
| 21. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT DANS LES CABLES DE BUS CAN (ENSEMBLE DE CONTROLE D'ANGLE MORT GAUCHE) |
(a) Rebrancher le connecteur de jonction R100 n° 5.
(b) Débrancher le connecteur W6 du capteur gauche d'angle mort.
| (c) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous. Résistance standard:
|
|
| OK | | REMPLACER LE CAPTEUR GAUCHE D'ANGLE MORT |
| MAL | | REPARER OU REMPLACER LE CABLE PRINCIPAL CAN OU LE CONNECTEUR (CAPTEUR DE MONITEUR D'ANGLE MORT GAUCHE - CONNECTEUR DE JONCTION N° 5) |
| 22. |
RECHERCHER UN COURT-CIRCUIT EVENTUEL DANS LES CABLES DE BUS CAN (ENSEMBLE D'ECU D'AVERTISSEMENT DE DISTANCE) |
(a) Rebrancher le connecteur de jonction R100 n° 5.
| (b) Débrancher le connecteur R39 d'ensemble d'ECU d'avertissement de distance. |
|
(c) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
R39-37 (CANH) - K68-4 (CG) |
Câble débranché de la borne négative (-) de la batterie |
200 Ω minimum |
|
R39-38 (CANL) - K68-4 (CG) |
Câble débranché de la borne négative (-) de la batterie |
200 Ω minimum |
|
R39-37 (CANH) - K68-16 (BAT) |
Câble débranché de la borne négative (-) de la batterie |
6 kΩ minimum |
|
R39-38 (CANL) - K68-16 (BAT) |
Câble débranché de la borne négative (-) de la batterie |
6 kΩ minimum |
| OK | | REMPLACER L'ENSEMBLE D'ECU D'AVERTISSEMENT DE DISTANCE |
| MAL | | REPARER OU REMPLACER LE CABLE DE BUS CAN (ENSEMBLE D'ECU D'AVERTISSEMENT DE DISTANCE - CONNECTEUR DE JONCTION N° 5) |
 Bus de communication de module de commande "A" en position OFF (U0073,U0100,U0124,U0126,U0129,U0140,U0155,U0164)
Bus de communication de module de commande "A" en position OFF (U0073,U0100,U0124,U0126,U0129,U0140,U0155,U0164) Echec de la communication CAN (registre de messages) (U1000)
Echec de la communication CAN (registre de messages) (U1000)Tableau Des Symptomes De Problemes
TABLEAU DES SYMPTOMES DE PROBLEMES
CONSEIL:
Utiliser le tableau ci-dessous pour déterminer la cause des symptômes du problème. Si plusieurs zones incriminées sont énumérées, les causes éventuelles des symptômes sont présent&ea ...
Court-circuit dans le circuit du déclencheur de l'airbag genoux (côté passager) (B1865-B1868)
DESCRIPTION Le circuit du déclencheur d'airbag genoux côté passager avant comprend l'ensemble de capteur d'airbag et l'ensemble d'airbag inférieur de tableau de bord n° 2.
L'ensemble de capteur d'airbag utilise ce circuit pour déployer l'airbag lorsque les condit ...
Avant de prendre le volant
Tapis de sol
Utilisez uniquement les tapis de sol ayant été spécialement conçus pour les
véhicules des mêmes modèle et millésime que votre véhicule. Fixez-les solidement
sur le tapis.
Insérez les crochets de fixation
(clips) dans les anneaux du tapis
de sol.
Tournez le b ...
.gif)