
 Toyota Camry et,
Toyota Camry et,
Toyota Partner.
Toyota Camry et,
PIECES CONSTITUTIVES
SCHEMA
|
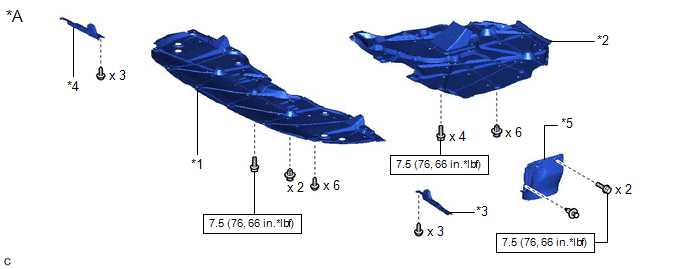
*A | fabrication TMC |
- | - |
|
*1 | SABOT DE PROTECTION DU MOTEUR N° 1 |
*2 | ENSEMBLE DE SABOT DE PROTECTION DE MOTEUR N° 2 |
|
*3 | REMBOURRAGE GAUCHE D'EXTENSION DE PASSAGE DE ROUE AVANT |
*4 | REMBOURRAGE DROIT D'EXTENSION DE PASSAGE DE ROUE AVANT |
|
*5 | JOINT DE JOUE D'AILE AVANT GAUCHE |
- | - |
.png) |
N*m (kgf*cm, ft*lbf): couple de serrage prescrit |
- | - |
SCHEMA
|
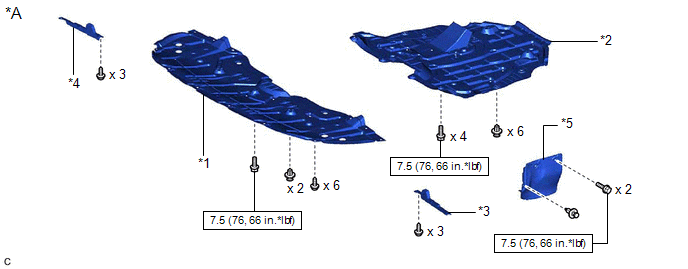
*A | fabrication TMMK |
- | - |
|
*1 | SABOT DE PROTECTION DU MOTEUR N° 1 |
*2 | ENSEMBLE DE SABOT DE PROTECTION DE MOTEUR N° 2 |
|
*3 | REMBOURRAGE GAUCHE D'EXTENSION DE PASSAGE DE ROUE AVANT |
*4 | REMBOURRAGE DROIT D'EXTENSION DE PASSAGE DE ROUE AVANT |
|
*5 | JOINT DE JOUE D'AILE AVANT GAUCHE |
- | - |
|
|
N*m (kgf*cm, ft*lbf): couple de serrage prescrit |
- | - |
SCHEMA
|
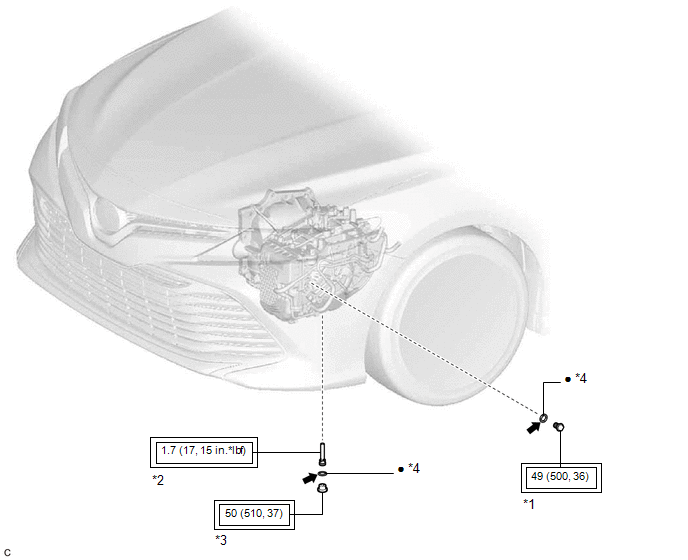
*1 | BOUCHON DE REMPLISSAGE |
*2 | TUYAU DE REMPLISSAGE D'HUILE DE BOITE DE VITESSES N° 1 |
|
*3 | BOUCHON DE TROP-PLEIN |
*4 | JOINT D'ETANCHEITE |
.png) |
Couple de serrage pour "zones principales concernant la performance de base du véhicule" tel que déplacement/virage/arrêt": N*m (kgf*cm, ft*lbf) |
● | Pièce non réutilisable |
.png) |
ATF WS d'origine Toyota |
- | - |
 Remplacement
RemplacementInformations sur le véhicule non conformes (C168D)
DESCRIPTION
Ce DTC est enregistré lorsque le dispositif de commande de caméra de télévision estime, suite à son autodiagnostic, que les informations du véhicule reçues via la communication CAN et les informations du véhicule stockées dans le dispositif de commande de caméra de télév ...
Circuit du signal du démarreur
DESCRIPTION Lorsque le moteur est entraîné par le démarreur, du courant passe de la borne ST1 de l'ensemble de contacteur d'allumage*1 ou de la borne STAR de l'ECU de certification (ensemble d'ECU de clé intelligente)*2 à l'ensemble de contacteur de position de stationnement/point mort et à la ...
Chassis
CHASSIS VERIFIER LE BOITIER ET LA TRINGLERIE DE DIRECTION
(a) Vérifier le jeu du volant. Cliquer ici
(b) S'assurer que la tringlerie de direction ne présente pas de jeu ou n'est pas endommagée.
(1) S'assurer que les embouts de barre d'accouplement ne présentent pas de jeu.
(2) S'assure ...
