
 Toyota Camry et,
Toyota Camry et,
Toyota Partner.
Toyota Camry et,
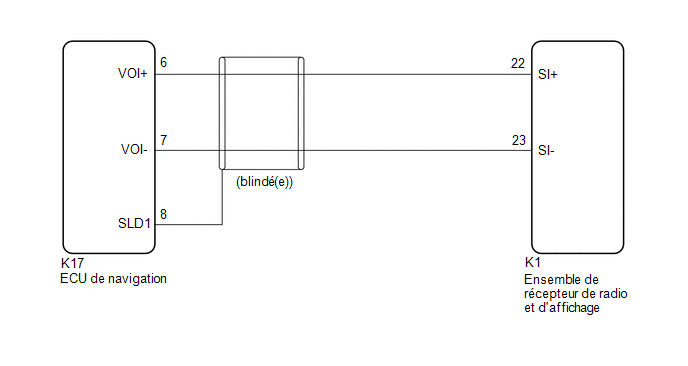
SCHEMA DE CABLAGE
PROCEDURE
| 1. |
VERIFIER LE REGLAGE DU GUIDAGE VOCAL |
(a) Vérifier que les paramètres de guidage vocal ne sont pas en position OFF.
OK:
Les réglages de guidage vocal ne sont pas en position OFF.
| INCORRECT | .gif) | METTRE LES REGLAGES DE GUIDAGE VOCAL SUR ON |
|
| 2. |
VERIFIER LE FAISCEAU DE CABLES ET LE CONNECTEUR (ENSEMBLE D'AUTORADIO ET D'AFFICHAGE - ECU DE NAVIGATION) |
(a) Débrancher le connecteur K1 d'ensemble de récepteur de radio et d'affichage.
(b) Débrancher le connecteur K17 de l'ECU de navigation.
(c) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
K1-22 (SI+) - K17-6 (VOI+) |
En permanence | En dessous de 1 Ω |
|
K1-23 (SI-) - K17-7 (VOI-) |
En permanence | En dessous de 1 Ω |
|
K1-22 (SI+) ou K17-6 (VOI+) - Masse de carrosserie |
En permanence | 10 kΩ minimum |
|
K1-23 (SI-) ou K17-7 (VOI-) - Masse de carrosserie |
En permanence | 10 kΩ minimum |
|
K17-8 (SLD1) - Masse de carrosserie |
En permanence | 10 kΩ minimum |
| OK | | PASSER A L'ORGANE INCRIMINE SUIVANT INDIQUE DANS LE TABLEAU DES SYMPTOMES DE PROBLEMES |
| INCORRECT | | REPARER OU REMPLACER LE FAISCEAU DE CABLES OU LE CONNECTEUR |
 L'icône "No GPS signal" s'affiche
L'icône "No GPS signal" s'affiche Impossibilité de calculer l'itinéraire
Impossibilité de calculer l'itinéraireRepose
REPOSE MESURE DE PRECAUTION / REMARQUE / CONSEIL
ATTENTION:
Veiller à lire attentivement les Mesures de précaution avant de procéder à l'entretien.
Cliquer ici
Porter des gants de protection. Les zones pointues des pièces peuvent blesser les mains.
...
Repose
REPOSE PROCEDURE 1. REPOSER LE BOUCHON D'ORIFICE
(a) Reposer les 7 bouchons d'orifice sur l'ensemble de cadre avant.
CONSEIL: Il y a 2 formes de bouchons d'orifice différentes.
2. REPOSER LE COUSSINET DE FIXATION ARRIERE GAUCHE DE CORPS DE TRAVERSE DE SUSPENSION AVANT
(a) Aligner un no ...
Schema Du Systeme
SCHEMA DU SYSTEME fabrication TMC
fabrication TMMK
...
.gif)