
 Toyota Camry et,
Toyota Camry et,
Toyota Partner.
Toyota Camry et,
MESURES DE PRECAUTION
MESURES DE PRECAUTION RELATIVES AU DEBRANCHEMENT DU CABLE DE LA BORNE NEGATIVE DE LA BATTERIE
REMARQUE:
Lors du débranchement du câble de la borne négative (-) de la batterie, initialiser les systèmes suivants une fois le câble rebranché.
|
Nom du système | Cf. procédure |
|---|---|
|
Système d'alerte de sortie de bande de circulation (avec commande de direction) |
|
|
Système de sonar de détection de distance intelligent | |
|
Système de moniteur d'aide au stationnement | |
|
Système d'écran de vue panoramique | |
|
Système de sécurité préventive |
MESURES DE PRECAUTION POUR L'ENTRETIEN DU VEHICULE
(a) Une fois les ECU ou les pièces déposées puis reposées ou remplacées lors de la vérification ou l'entretien du véhicule, il est nécessaire d'effectuer certaines procédures (réglage, calibrage, initialisation ou enregistrement).
Cliquer ici .gif)
MESURES DE PRECAUTION LORS DE LA RECHERCHE DE PANNES
(a) Lorsqu'un contact de borne est endommagé ou desserré ou si une pièce est mal posée, il se peut que le système ne revienne que provisoirement à la normale si la partie est déposée et posée sans avoir effectué de diagnostic et de réparation.
(b) Afin de faciliter le diagnostic, vérifier et prendre note des informations associées comme les DTC et les données d'arrêt sur image avant de débrancher les connecteurs ou de déposer et reposer les pièces.
(c) Etant donné que le système peut être influencé par les dysfonctionnements d'autres systèmes que le système de sonar de détection de distance intelligent, veiller à rechercher les DTC anciens et actuels des autres systèmes.
MESURES DE PRECAUTION RELATIVES A LA MANIPULATION DE L'ECU OU DU CAPTEUR
(a) A moins d'une spécification contraire dans la procédure de vérification, s'assurer que le contacteur du moteur est en position OFF lors de la dépose ou de la repose de chaque ECU ou capteur à ultrasons.
(b) Après la dépose et de la repose de chaque ECU ou capteur à ultrasons et lorsque toutes les pièces constitutives ont été reposées, vérifier et s'assurer qu'aucun DTC n'est émis.
PRECAUTIONS A PRENDRE LORS DE LA MANIPULATION DU SYSTEME DE SONAR DE DETECTION DE DISTANCE INTELLIGENT
(a) Veiller à respecter les points suivants lors de l'utilisation du système de sonar de détection de distance intelligent.
(1) Ne pas se fier exclusivement au système de sonar de détection de distance intelligent. Se fier uniquement au système de sonar de détection de distance intelligent peut entraîner un accident inattendu.
(2) Pour que le système de sonar de détection de distance intelligent fonctionne correctement, veiller à respecter les points suivants pour les capteurs à ultrasons. Dans le cas contraire, les capteurs à ultrasons risquent de ne pas fonctionner correctement, provoquant de graves blessures.
(3) Ne pas modifier la suspension, car des changements de hauteur ou d'inclinaison du véhicule peuvent gêner la bonne détection des obstacles par les capteurs à ultrasons. Le système risque ne pas fonctionner ou de dysfonctionner.
(4) Si la zone située autour d'un capteur à ultrasons est soumise à un impact, l'équipement peut ne pas fonctionner correctement en raison d'un dysfonctionnement du capteur à ultrasons.
(5) Lorsque le véhicule est lavé avec un nettoyant de type haute pression, ne pas asperger d'eau les capteurs à ultrasons ou les zones environnantes. L'eau sous pression peut endommager les capteurs à ultrasons.
(6) Lors de l'utilisation de vapeur pour laver le véhicule, ne pas appliquer trop de vapeur à proximité des capteurs à ultrasons. Ils risques de ne pas fonctionner correctement s'ils sont soumis à de la vapeur.
MESURES DE PRECAUTION RELATIVES A LA FONCTION DE SYSTEME DE SONAR DE DETECTION DE DISTANCE INTELLIGENT
(a) Dans les conditions suivantes, le système de sonar de détection de distance intelligent peut ne pas fonctionner correctement.
(1) Influence environnementale
(2) Influence des conditions climatiques
(3) Influence d'autres ultrasons
(4) Modifications du véhicule
(b) Les capteurs sont incapables de détecter les objets suivants:
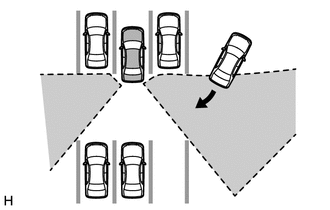
MESURES DE PRECAUTION POUR LA FONCTION DE FREINAGE AUTOMATIQUE DE CROISEMENT DE CIRCULATION A L'ARRIERE
(a) La fonction de freinage automatique de croisement de circulation à l'arrière ne détecte pas les objets et les véhicules suivants:
(1) Des objets immobiles.
(2) Des véhicules s'éloignant de ce véhicule
(3) Des objets en mouvement autres que des véhicules de tourisme comme des piétons, des motos ou des bicyclettes
(4) Des objets extrêmement proches des capteurs de contrôle d'angle mort
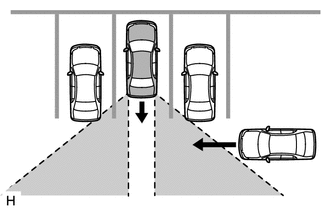
(5) La vitesse d'un véhicule qui approche par la droite ou la gauche à l'arrière du véhicule est inférieure à 8 km/h (5 mi/h).
(6) La vitesse d'un véhicule qui approche par la droite ou la gauche à l'arrière du véhicule est supérieure à 24 km/h (15 mi/h).
(b) La fonction de freinage automatique de croisement de circulation à l'arrière peut ne pas être capable de détecter des objets dans les situations suivantes:
(1) Lorsque le véhicule est stationné dans un environnement extrêmement chaud ou froid.
(2) Lorsque des corps étrangers comme de la neige, de la glace ou de la boue sont présents sur le pare-chocs arrière.
(3) En cas de fortes pluies ou lorsque de l'eau est projetée sur le véhicule.
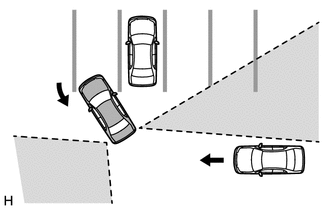
(4) Lorsque le capteur de contrôle d'angle mort ne voit pas un véhicule en approche masqué par un véhicule adjacent.
(5) Lorsque le véhicule est fortement incliné.
(6) Lorsque le véhicule est remorqué.
(7) Lorsque le véhicule est équipé d'une suspension rabaissée ou de pneus d'un diamètre différent à celui d'origine.
(8) Lorsque la hauteur du véhicule a considérablement changé (le nez est incliné vers le haut ou vers le bas).
(9) Lorsque des composants électroniques comme une plaque d'immatriculation rétroéclairée, des feux antibrouillard, un pôle publicitaire, une antenne de commande à distance ou autocollants sont posés près des capteurs.
(10) Lorsque le capteur de contrôle d'angle mort est mal aligné.
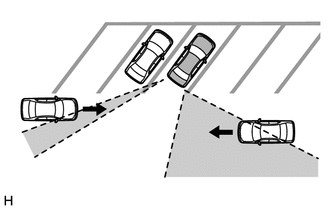
(11) Lorsque plusieurs véhicules s'approchent en présentant peu d'espace entre eux.
(12) Lorsqu'un véhicule approche à une vitesse élevée.
(c) La fonction de freinage automatique de croisement de circulation à l'arrière peut ne pas détecter
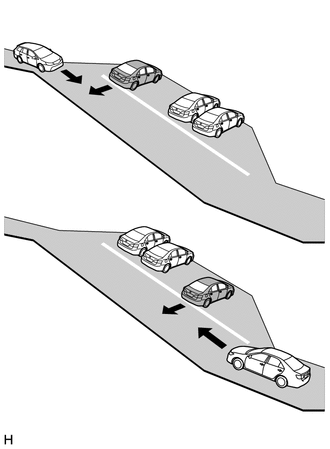
(1) Lorsqu'un véhicule approche par l'arrière.
(2) Lorsque le véhicule est garé dans un angle faible.
(3) Lorsque l'un des capteur de contrôle d'angle mort est obstrué comme par un véhicule adjacent.
(4) Lorsque le véhicule est stationné sur une pente raide avec des inclinaisons variables.
(5) Lorsqu'un véhicule tourne très près du véhicule
 Emplacement Des Pieces Constitutives
Emplacement Des Pieces ConstitutivesReconnaissance du système audio USB/Erreur de lecture
DESCRIPTION Lorsqu'un appareil USB ou "iPod" est branché sur la prise USB de l'ensemble d'adaptateur de prise stéréo n° 1, il doit contenir des fichiers pouvant être lus. L'appareil doit également communiquer avec l'ensemble de récepteur de radio et d'affichage et être reconnu par celui-ci. ...
Depose
DEPOSE PROCEDURE 1. DEPOSER LE REMBOURRAGE DROIT D'EXTENSION DE PASSAGE DE ROUE AVANT
Cliquer ici
2. DEPOSER LE REMBOURRAGE D'EXTENSION DE PASSAGE DE ROUE AVANT GAUCHE Cliquer ici
3. DEPOSER LE SABOT DE PROTECTION DE MOTEUR N° 1
Cliquer ici
4. DEPOSER L'ENSEMBLE DE SABOT DE PROTE ...
Pieces Constitutives
PIECES CONSTITUTIVES SCHEMA
*1 CAPTEUR DE PRESSION DE
CLIMATISATION -
-
N*m (kgf*cm, lbf*pi): couple de serrage prescrit
● Pièce non réutilisable
pour HFC-134a (R134a): Huile pour compresseur ND-OIL 8 ou
produit équivalent pour HFO-1234yf (R ...
