Toyota Camry et,
Toyota Camry et,
Toyota Partner.
Toyota Camry et,
DESCRIPTION
Ce DTC est enregistré lorsque le capteur de moniteur d'angle mort droit détermine qu'il y a un problème de communication avec le capteur de moniteur d'angle mort gauche.
|
N° de DTC | Objet de la détection |
Condition de détection du DTC |
Organe incriminé |
|---|---|---|---|
|
U0232 | Perte de la communication avec le module auxiliaire de contrôle d'angle mort |
Le capteur de moniteur d'angle mort (principal) ne reçoit pas les signaux en provenance du capteur de moniteur d'angle mort (auxiliaire). |
|
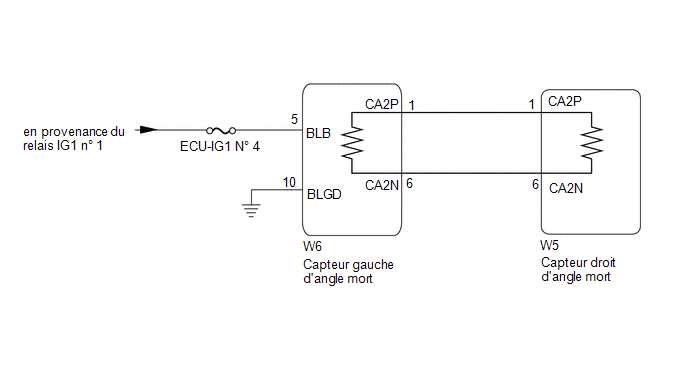
SCHEMA DE CABLAGE
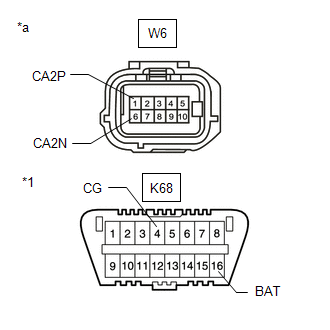
Avec système de sonar de détection de distance intelligent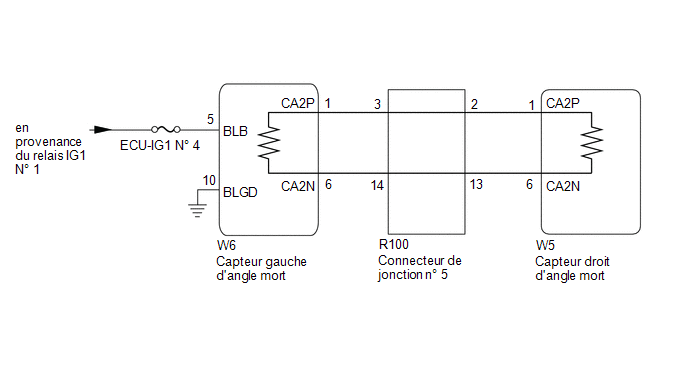 sans système de sonar de détection de distance intelligent
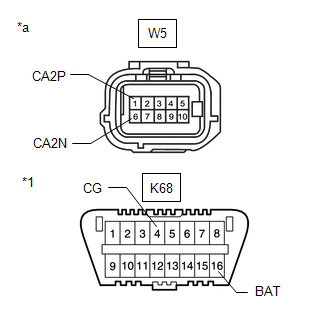
sans système de sonar de détection de distance intelligent
MESURE DE PRECAUTION / REMARQUE / CONSEIL
REMARQUE:
Cliquer ici .gif)
CONSEIL:
PROCEDURE
|
1. | CONFIRMER LE MODELE |
(a) Sélectionner le modèle à vérifier.
Résultat:
|
Résultat | Passer au point |
|---|---|
|
Avec système de sonar de détection de distance intelligent |
A |
| sans système de sonar de détection de distance intelligent |
B |
| B |
.gif) | PASSER AU POINT 16 |
|
| 2. |
VERIFIER SI DES DTC SONT EMIS (SYSTEME DE SONAR DE DETECTION DE DISTANCE INTELLIGENT) |
(a) A l'aide du Techstream, vérifier les DTC en suivant les indications affichées sur l'écran.
Body Electrical > Advanced Parking Guidance/ICS/Intuitive P/A > Trouble CodesStandard:
L'ensemble d'ECU d'avertissement de distance n'émet pas simultanément les DTC U0232 et U0233.
| MAL | | PASSER AU SYSTEME DE SONAR DE DETECTION DE DISTANCE INTELLIGENT (DTC U0232) |
|
| 3. |
VERIFIER LE CABLE PRINCIPAL DE BUS CAN |
(a) Mettre le contacteur du moteur en position OFF.
(b) Débrancher le câble de la borne négative (-) de la batterie.
| (c) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous. Résistance standard:
|
|
(d) Rebrancher le câble sur la borne négative (-) de la batterie.
Résultat:
|
Résultat | Passer au point |
|---|---|
|
OK | A |
|
Coupure de circuit au niveau des lignes du bus principal CAN |
B |
| Court-circuit entre les lignes bus |
C |
| D |
| B |
| PASSER AU POINT 7 |
| C |
| PASSER AU POINT 10 |
| D |
| PASSER AU POINT 13 |
|
| 4. |
VERIFIER LE FAISCEAU DE CABLES ET LE CONNECTEUR (CAPTEUR DE MONITEUR D'ANGLE MORT GAUCHE - MASSE DE CARROSSERIE) |
Cliquer ici
| MAL | | REPARER OU REMPLACER LE FAISCEAU DE CABLES OU LE CONNECTEUR |
|
| 5. |
VERIFIER LE FAISCEAU DE CABLES ET LE CONNECTEUR (CAPTEUR DE MONITEUR D'ANGLE MORT GAUCHE - SOURCE D'ALIMENTATION ELECTRIQUE) |
Cliquer ici
| MAL | | REPARER OU REMPLACER LE FAISCEAU DE CABLES OU LE CONNECTEUR |
|
| 6. |
VERIFIER DTC |
(a) Mettre le contacteur du moteur en position OFF.
(b) Mettre le contacteur du moteur en position ON (IG).
(c) Vérifier les DTC.
Body Electrical > Blind Spot Monitor Master > Trouble CodesOK:
Aucun DTC n'est émis.
| OK | |
SIMULATION DE SYMPTOMES |
| MAL | | REMPLACER LE CAPTEUR GAUCHE D'ANGLE MORT |
| 7. |
RECHERCHER UNE EVENTUELLE COUPURE DANS LE CABLE PRINCIPAL DE BUS CAN (CONNECTEUR DE JONCTION N° 5) |
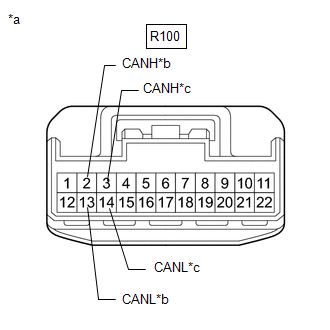
| (a) Débrancher le connecteur R100 du connecteur de jonction n° 5. |
|
(b) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
R122-3 (CANH) - R122-14(CANL) |
Câble débranché de la borne négative (-) de la batterie |
108 à 132 Ω |
|
R122-2 (CANH) - R122-13(CANL) |
Câble débranché de la borne négative (-) de la batterie |
108 à 132 Ω |
Résultat:
|
Résultat | Passer au point |
|---|---|
|
OK | A |
|
NG (vers le câble CAN principal du capteur de contrôle d'angle mort droit) |
B |
| NG (vers le câble CAN principal du capteur de contrôle d'angle mort gauche) |
C |
| A |
| REMPLACER LE CONNECTEUR DE JONCTION N° 5 |
| C |
| PASSER AU POINT 9 |
|
| 8. |
RECHERCHER UNE EVENTUELLE COUPURE DANS LE CABLE DE BUS CAN PRINCIPAL (CAPTEUR DE CONTROLE D'ANGLE MORT DROIT) |
(a) Rebrancher le connecteur de jonction R100 n° 5.
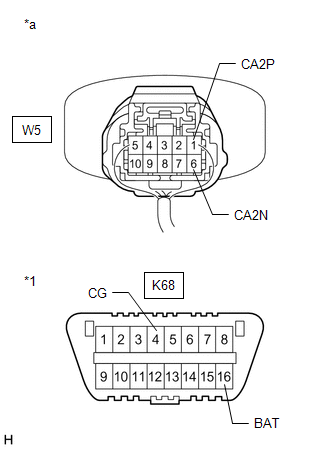
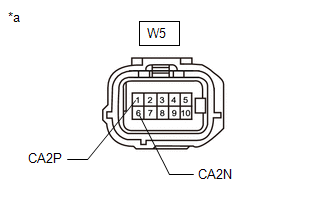
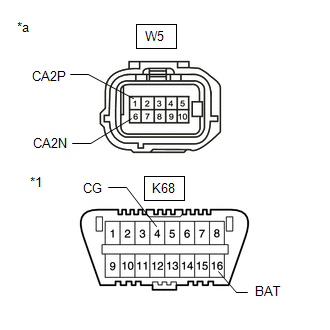
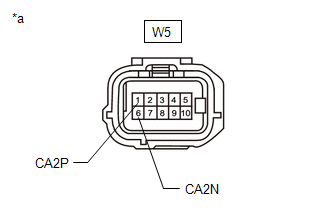
| (b) Débrancher le connecteur W5 du capteur droit d'angle mort droit. |
|
(c) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
W5-1 (CA2P) - W5-6 (CA2N) |
Câble débranché de la borne négative (-) de la batterie |
108 à 132 Ω |
| OK | | REMPLACER LE CAPTEUR DROIT D'ANGLE MORT |
| MAL | | REPARER OU REMPLACER LE CABLE PRINCIPAL CAN OU LE CONNECTEUR (CAPTEUR DE MONITEUR D'ANGLE MORT DROIT - CONNECTEUR DE JONCTION N° 5) |
| 9. |
RECHERCHER UNE EVENTUELLE COUPURE DANS LE CABLE DE BUS CAN PRINCIPAL (CAPTEUR DE CONTROLE D'ANGLE MORT GAUCHE) |
(a) Rebrancher le connecteur de jonction R100 n° 5.
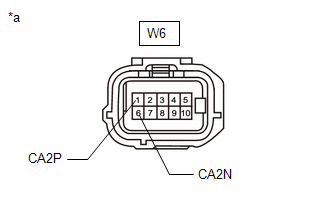
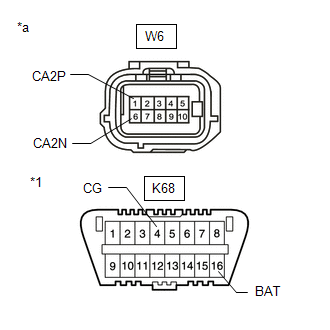
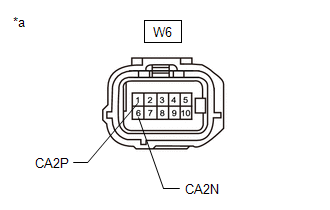
| (b) Débrancher le connecteur W6 du capteur gauche d'angle mort. |
|
(c) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
W6-1 (CA2P) - W6-6 (CA2N) |
Câble débranché de la borne négative (-) de la batterie |
108 à 132 Ω |
| OK | | REMPLACER LE CAPTEUR GAUCHE D'ANGLE MORT |
| MAL | | REPARER OU REMPLACER LE CABLE PRINCIPAL CAN OU LE CONNECTEUR (CAPTEUR DE MONITEUR D'ANGLE MORT GAUCHE - CONNECTEUR DE JONCTION N° 5) |
| 10. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT DANS LES CABLES DE BUS CAN (CONNECTEUR DE JONCTION N° 5) |
| (a) Débrancher le connecteur R100 du connecteur de jonction n° 5. |
|
(b) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
R122-3 (CANH) - R122-14 (CANL) |
Câble débranché de la borne négative (-) de la batterie |
108 à 132 Ω |
|
R122-1 (CANH) - R122-12 (CANL) |
Câble débranché de la borne négative (-) de la batterie |
108 à 132 Ω |
Résultat:
|
Résultat | Passer au point |
|---|---|
|
OK | A |
|
NG (vers le câble CAN principal du capteur de contrôle d'angle mort droit) |
B |
| NG (vers le câble CAN principal du capteur de contrôle d'angle mort gauche) |
C |
| A |
| REMPLACER LE CONNECTEUR DE JONCTION N° 5 |
| C |
| PASSER AU POINT 12 |
|
| 11. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT DANS LES CABLES DE BUS CAN (CAPTEUR DE CONTROLE D'ANGLE MORT DROIT) |
(a) Rebrancher le connecteur de jonction R100 n° 5.
| (b) Débrancher le connecteur W5 du capteur droit d'angle mort droit. |
|
(c) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
W5-1 (CA2P) - W5-6 (CA2N) |
Câble débranché de la borne négative (-) de la batterie |
108 à 132 Ω |
| OK | | REMPLACER LE CAPTEUR DROIT D'ANGLE MORT |
| MAL | | REPARER OU REMPLACER LE CABLE PRINCIPAL CAN OU LE CONNECTEUR (CAPTEUR DE MONITEUR D'ANGLE MORT DROIT - CONNECTEUR DE JONCTION N° 5) |
| 12. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT DANS LES CABLES DE BUS CAN (ENSEMBLE DE CONTROLE D'ANGLE MORT GAUCHE) |
(a) Rebrancher le connecteur de jonction R100 n° 5.
| (b) Débrancher le connecteur W6 du capteur gauche d'angle mort. |
|
(c) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
W6-1 (CA2P) - W6-6 (CA2N) |
Câble débranché de la borne négative (-) de la batterie |
108 à 132 Ω |
| OK | | REMPLACER LE CAPTEUR GAUCHE D'ANGLE MORT |
| MAL | | REPARER OU REMPLACER LE CABLE PRINCIPAL CAN OU LE CONNECTEUR (CAPTEUR DE MONITEUR D'ANGLE MORT GAUCHE - CONNECTEUR DE JONCTION N° 5) |
| 13. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT DANS LES CABLES DE BUS CAN (CONNECTEUR DE JONCTION N° 5) |
(a) Débrancher le connecteur R100 du connecteur de jonction n° 5.
(b) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
|
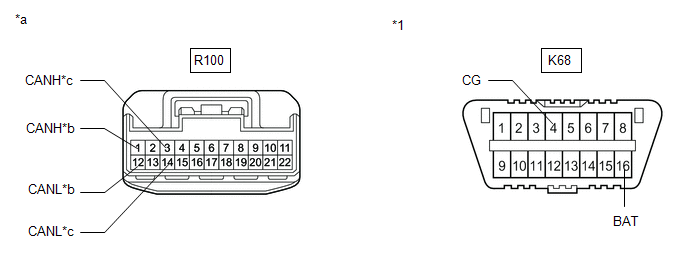
*1 | DLC3 |
- | - |
|
*a | Vue avant du connecteur côté faisceau de câbles (vers le connecteur de jonction n° 5) |
*b | vers le câble CAN principal du capteur de contrôle d'angle mort droit |
|
*c | vers le câble CAN principal du capteur de contrôle d'angle mort gauche |
- | - |
Résistance standard:
|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
R122-3 (CANH) - K68-4 (CG) |
Câble débranché de la borne négative (-) de la batterie |
200 Ω minimum |
|
R122-14 (CANL) - K68-4 (CG) |
Câble débranché de la borne négative (-) de la batterie |
200 Ω minimum |
|
R122-3 (CANH) - K68-16 (BAT) |
Câble débranché de la borne négative (-) de la batterie |
6 kΩ minimum |
|
R122-14 (CANL) - K68-16 (BAT) |
Câble débranché de la borne négative (-) de la batterie |
6 kΩ minimum |
|
R122-1 (CANH) - K68-4 (CG) |
Câble débranché de la borne négative (-) de la batterie |
200 Ω minimum |
|
R122-12 (CANL) - K68-4 (CG) |
Câble débranché de la borne négative (-) de la batterie |
200 Ω minimum |
|
R122-1 (CANH) - K68-16 (BAT) |
Câble débranché de la borne négative (-) de la batterie |
6 kΩ minimum |
|
R122-12 (CANL) - K68-16 (BAT) |
Câble débranché de la borne négative (-) de la batterie |
6 kΩ minimum |
Résultat:
|
Résultat | Passer au point |
|---|---|
|
OK | A |
|
NG (vers le câble CAN principal du capteur de contrôle d'angle mort droit) |
B |
| NG (vers le câble CAN principal du capteur de contrôle d'angle mort gauche) |
C |
| A |
| REMPLACER LE CONNECTEUR DE JONCTION N° 5 |
| C |
| PASSER AU POINT 15 |
|
| 14. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT DANS LES CABLES DE BUS CAN (CAPTEUR DE CONTROLE D'ANGLE MORT DROIT) |
(a) Rebrancher le connecteur de jonction R100 n° 5.
(b) Débrancher le connecteur W5 du capteur droit d'angle mort droit.
| (c) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous. Résistance standard:
|
|
| OK | | REMPLACER LE CAPTEUR DROIT D'ANGLE MORT |
| MAL | | REPARER OU REMPLACER LE CABLE PRINCIPAL CAN OU LE CONNECTEUR (CAPTEUR DE MONITEUR D'ANGLE MORT DROIT - CONNECTEUR DE JONCTION N° 5) |
| 15. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT DANS LES CABLES DE BUS CAN (ENSEMBLE DE CONTROLE D'ANGLE MORT GAUCHE) |
(a) Rebrancher le connecteur de jonction R100 n° 5.
(b) Débrancher le connecteur W6 du capteur gauche d'angle mort.
| (c) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous. Résistance standard:
|
|
| OK | | REMPLACER LE CAPTEUR GAUCHE D'ANGLE MORT |
| MAL | | REPARER OU REMPLACER LE CABLE PRINCIPAL CAN OU LE CONNECTEUR (CAPTEUR DE MONITEUR D'ANGLE MORT GAUCHE - CONNECTEUR DE JONCTION N° 5) |
| 16. |
VERIFIER LE CABLE PRINCIPAL DE BUS CAN |
(a) Mettre le contacteur du moteur en position OFF.
(b) Débrancher le câble de la borne négative (-) de la batterie.
| (c) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous. Résistance standard:
|
|
(d) Rebrancher le câble sur la borne négative (-) de la batterie.
Résultat:
|
Résultat | Passer au point |
|---|---|
|
OK | A |
|
Coupure de circuit au niveau des lignes du bus principal CAN |
B |
| Court-circuit entre les lignes bus |
C |
| D |
| B |
| PASSER AU POINT 20 |
| C |
| PASSER AU POINT 22 |
| D |
| PASSER AU POINT 24 |
|
| 17. |
VERIFIER LE FAISCEAU DE CABLES ET LE CONNECTEUR (CAPTEUR DE MONITEUR D'ANGLE MORT GAUCHE - MASSE DE CARROSSERIE) |
Cliquer ici
| MAL | | REPARER OU REMPLACER LE FAISCEAU DE CABLES OU LE CONNECTEUR |
|
| 18. |
VERIFIER LE FAISCEAU DE CABLES ET LE CONNECTEUR (CAPTEUR DE MONITEUR D'ANGLE MORT GAUCHE - SOURCE D'ALIMENTATION ELECTRIQUE) |
Cliquer ici
| MAL | | REPARER OU REMPLACER LE FAISCEAU DE CABLES OU LE CONNECTEUR |
|
| 19. |
VERIFIER DTC |
(a) Mettre le contacteur du moteur en position OFF.
(b) Mettre le contacteur du moteur en position ON (IG).
(c) Vérifier les DTC.
Body Electrical > Blind Spot Monitor Master > Trouble CodesOK:
Aucun DTC n'est émis.
| OK | |
SIMULATION DE SYMPTOMES |
| MAL | | REMPLACER LE CAPTEUR GAUCHE D'ANGLE MORT |
| 20. |
RECHERCHER UNE EVENTUELLE COUPURE DANS LE CABLE DE BUS CAN PRINCIPAL (CAPTEUR DE CONTROLE D'ANGLE MORT GAUCHE) |
(a) Débrancher le câble de la borne négative (-) de la batterie.
| (b) Débrancher le connecteur W6 du capteur gauche d'angle mort. |
|
(c) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
W6-1 (CA2P) -W6-6 (CA2N) |
Câble débranché de la borne négative (-) de la batterie |
108 à 132 Ω |
| OK | | REMPLACER LE CAPTEUR GAUCHE D'ANGLE MORT |
|
| 21. |
RECHERCHER UNE EVENTUELLE COUPURE DANS LE CABLE DE BUS CAN PRINCIPAL (CAPTEUR DE CONTROLE D'ANGLE MORT DROIT) |
(a) Rebrancher le connecteur W6 de capteur de moniteur d'angle mort gauche.
| (b) Débrancher le connecteur W5 du capteur droit d'angle mort droit. |
|
(c) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
W5-1 (CA2P) - W5-6 (CA2N) |
Câble débranché de la borne négative (-) de la batterie |
108 à 132 Ω |
| OK | | REMPLACER LE CAPTEUR DROIT D'ANGLE MORT |
| MAL | | REPARER OU REMPLACER LE CABLE PRINCIPAL CAN OU LE CONNECTEUR (CAPTEUR DE MONITEUR D'ANGLE MORT DROIT - CAPTEUR DE MONITEUR D'ANGLE MORT GAUCHE) |
| 22. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT DANS LES CABLES DE BUS CAN (ENSEMBLE DE CONTROLE D'ANGLE MORT GAUCHE) |
(a) Débrancher le câble de la borne négative (-) de la batterie.
| (b) Débrancher le connecteur W6 du capteur gauche d'angle mort. |
|
(c) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
W6-1 (CA2P) -W6-6 (CA2N) |
Câble débranché de la borne négative (-) de la batterie |
108 à 132 Ω |
| OK | | REMPLACER LE CAPTEUR GAUCHE D'ANGLE MORT |
|
| 23. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT DANS LES CABLES DE BUS CAN (CAPTEUR DE CONTROLE D'ANGLE MORT DROIT) |
(a) Rebrancher le connecteur W6 de capteur de moniteur d'angle mort gauche.
| (b) Débrancher le connecteur W5 du capteur droit d'angle mort droit. |
|
(c) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous.
Résistance standard:
|
Branchement du tester | Condition |
Condition spécifiée |
|---|---|---|
|
W5-1 (CA2P) - W5-6 (CA2N) |
Câble débranché de la borne négative (-) de la batterie |
108 à 132 Ω |
| OK | | REMPLACER LE CAPTEUR DROIT D'ANGLE MORT |
| MAL | | REPARER OU REMPLACER LE CABLE PRINCIPAL CAN OU LE CONNECTEUR (CAPTEUR DE MONITEUR D'ANGLE MORT DROIT - CAPTEUR DE MONITEUR D'ANGLE MORT GAUCHE) |
| 24. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT DANS LES CABLES DE BUS CAN (ENSEMBLE DE CONTROLE D'ANGLE MORT GAUCHE) |
(a) Débrancher le câble de la borne négative (-) de la batterie.
(b) Débrancher le connecteur W6 du capteur gauche d'angle mort.
| (c) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous. Résistance standard:
|
|
| OK | | REMPLACER LE CAPTEUR GAUCHE D'ANGLE MORT |
|
| 25. |
RECHERCHER UN EVENTUEL COURT-CIRCUIT DANS LES CABLES DE BUS CAN (CAPTEUR DE CONTROLE D'ANGLE MORT DROIT) |
(a) Débrancher le connecteur W5 du capteur droit d'angle mort droit.
| (b) Mesurer la résistance en fonction de la (des) valeur(s) indiquée(s) dans le tableau ci-dessous. Résistance standard:
|
|
| OK | | REMPLACER LE CAPTEUR DROIT D'ANGLE MORT |
| MAL | | REPARER OU REMPLACER LE CABLE PRINCIPAL CAN OU LE CONNECTEUR (CAPTEUR DE MONITEUR D'ANGLE MORT DROIT - CAPTEUR DE MONITEUR D'ANGLE MORT GAUCHE) |
 Capteur d'embardée (C1A46)
Capteur d'embardée (C1A46) Perte de la communication avec l'ECM/PCM "A" (U0100,U0125,U0126,U0129,U0142)
Perte de la communication avec l'ECM/PCM "A" (U0100,U0125,U0126,U0129,U0142)Emplacement Des Pieces Constitutives
EMPLACEMENT DES PIECES CONSTITUTIVES SCHEMA
*A fabrication TMC
*B avec clignotant latéral
*C avec système des feux de route automatique
- -
*1 ENSEMBLE DE PHARE GAUCHE
*2 ENSEMBLE DE PHARE DROIT
*3 ENSEMBLE DE CLIGNOTANT LATERAL GAU ...
Capteur central avant droit (C1AE3)
DESCRIPTION Le capteur à ultrasons central avant droit est posé sur le pare-chocs avant. L'ensemble d'ECU d'avertissement de distance détecte les obstacles en fonction des signaux reçus du capteur à ultrasons central avant droit. Si le capteur à ultrasons central avant droit présente une coup ...
Reconnaissance du système audio USB/Erreur de lecture
DESCRIPTION Lorsqu'un appareil USB ou "iPod" est branché sur la prise USB de l'ensemble d'adaptateur de prise stéréo n° 1, il doit contenir des fichiers pouvant être lus. L'appareil doit également communiquer avec l'ensemble de récepteur de radio et d'affichage et être reconnu par celui-ci. ...
.gif)